

2024年夏、BMW製としては4世代目となる新型MINIが登場しました。今回のモデルはBEV版のJ01が先にデビュー、追ってICE版となるF66がデビューしています。コードネームが示すとおり、4代目F66は先代F56の大幅ブラッシュアップ版。内外装はJ01と共通した新意匠に仕立てられていますが、エンジンやパワートレインはF56と同じものを継続採用しています。『これが最後のICE版MINI』と言われていますが、その最後を飾るモデルとしては・・・いささか寂しいものを感じます。
ところで、ルーツとなったBMW製初代MINI R50系の登場から実に22年が経過。当時はBEV車はおろかHEV車もまだ少数派だった時代、エンジン車が主流だった中でBMWより満を持して登場したモデルでしたが、搭載されたエンジンはBMW製ではなく外部から調達したものであったことはMINIファンなら誰でも知っている有名な話。性能的に特筆すべき点は少なく、デビュー当初はあまり良い評判を獲得しませんでしたが、後に『とても頑丈である』という隠れた長所が明らかになり、結果として未だに現役で走り回る個体が多いことに繋がっています。
そこで今回は、エンジンの話題を中心に初代R50系MINIを振り返ってみます。
次世代Mini前夜・・・Rover MetroとKシリーズエンジン

まずはBMW製MINIが登場する前から振り返ってみます。
British Motor Corporation (BMC)が1959年に発売した初代Miniは、41年間にわたり販売されたことは広く知られていることでしょう。その裏で、世界的に支持された偉大なモデルの後継車を産み出すのは実に困難を極めます。BMCがBritish Leyland (BL)と名を変え、その後Rover Groupと変遷する間に幾度となく次世代モデルの開発が試みられました。しかし、コスト制約など多くの課題が解決できず、新モデルへの刷新はなかなか達成されません。
その過程の中1980年に発売されたAustin Metroは、Mini後継モデル開発プロジェクトから派生して誕生したモデルでした。Miniと同じスーパーミニセグメントに属していますが、直接の後継モデルではなくMiniの上位モデルとして設計されています。エンジン、ギアボックス、サスペンションなどの主要部品はMiniから転用されたものの、外観はまったく異なりライバルとそう代わり映えのしないオーソドックスなスタイルを採用しているのが特徴です。
Rover Kシリーズエンジンの登場

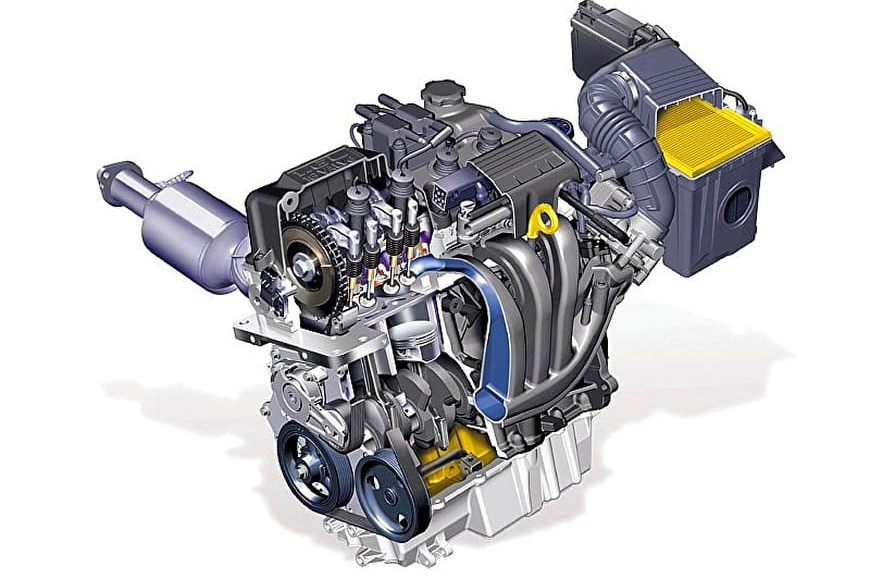
そのMetroの2代目モデルから採用されたのが、新開発の直列4気筒エンジン「Rover Kシリーズ」です。当時のRoverはホンダと業務提携をしており、シビックやアコード、レジェンドなどのモデルをベースとした車種を販売していました。それらの車種にはホンダ製エンジンが組み合わされていましたが、小型レンジを担うエンジンはホンダから供給を受けず、自社開発のKシリーズエンジンを搭載しています。

市場投入は1988年。まずはBセグメントのRover 200より搭載がスタートしています。当初は1.1L SOHCと1.4L DOHCの2本立て。その後、ホンダとの提携・エンジン供給が終了する際には空いてしまうレンジを埋めるため、ボア・ストロークアップにより1.6Lと1.8Lの派生モデルを追加しています。
Kシリーズエンジン最大の特徴は軽さでした。低圧砂型鋳造技術を用いて壁厚を薄くしながらも強度確保したアルミブロックを採用したことで、油脂類や補機類を含めても100kgを下回る軽量なエンジンに仕上がっています。1.6L直列4気筒仕様のスペックは110ps/138Nmと殊更に高性能ではなかったものの、軽さは凡庸なスペックを補うだけの説得力があります。
軽量であることが好まれたKシリーズ

その特徴ゆえに、KシリーズエンジンはMG/Roverのモデルだけでなく、他社製ライトウェイトスポーツカーにも搭載されたこともトピックでした。代表例がLotus Eliseです。一説によれば、Kシリーズエンジンの登場があったことでLotsuがEliseを開発する契機をもたらしたとまで言われています。Eliseへの搭載にあたり、スペックの引き上げなども行われていないのも印象的です。1996年のElise S1発売時からRover破綻後の2005年まで長らく搭載されていました。
元々は10年間ノントラブルを誇るエンジンとして設計されていましたが、軽量化の弊害でトラブルも多く、一説には排気量が大きくなるほどにメンテナンスがより重要になると言われています。これはブロックのサイズを拡大せずに幅広い排気量をカバーする設計となっていた(開発費が限られていたという懐事情もあった)のですが、その代償として熱処理に課題があり、ヘッドガスケットにストレスがひどくかかるためガスケットが抜けオイルと冷却水が混ざるといった重度なトラブルが報告されています。
次世代MINIの開発競争

その後、Austin MetroはRover Metro、Rover 100と名前を変え3代に渡って販売されます。RoverはMetroのモデルライフを延命する間に次世代Miniを生み出そうと考えていたようで、3代目Metro(Rover 100)が発売される直前の1993年より開発がスタートします。
偉大になりすぎたMiniの後継モデルはコンセプトを絞りこむだけでも大変な作業で、複数のコンセプトモデルが検討されます。初代Miniのデザイン要素を取り込んだ前輪駆動のコンパクトカー、リアエンジン・後輪駆動としたスペース重視のモデルなど、Miniのヘリテージをあらゆる面から解釈し現代化したモデルなどがありました。一方、メカニカル面は新開発技術の搭載は想定しておらず、共通してKシリーズエンジンやHydragasサスペンションシステムなど当時のRoverが保有していた技術、コンポーネントを活用する前提で検討が進んでいました。
時を同じくして、独自に次世代Miniを検討する自動車メーカーがありました。ドイツ・ミュンヘンに拠点を置くBMWです。よく知られている話として、BMWはRover Groupの全てを欲しがったのではなく、長いヘリテージと魅力を持つMiniブランドだけを手中に収めたいという思惑だったと言われています。その結果、Rover側で次世代Miniの開発がスタートした翌年の1994年、BMWはRover Groupを買収。思惑どおりMiniブランドを獲得することになります。
2種類のコンセプトモデル登場


Metro/100を基として新しいコンパクトカーを模索するRover、元祖Miniが持つスポーティさ、ヘリテージ、ファッションアイコン的なイメージを活かした全く新しいコンパクトカーを模索するBMW。両者が考える次世代のMini像は似ているようで全く異なるものでした。
その結果、1997年初頭に2種類のショー用コンセプトカーが公開されます。ひとつはACV30と呼ばれるレトロスポーティなモデル、もうひとつはSpiritual/Spiritual Tooと呼ばれるスペース効率重視のモダンなモデルです。前者はBMW側が提案したモデル、後者はRover側が提案したモデルです。見た目だけでなく全体の方向性が全く異なるモデル達でしたが、両者ともそれぞれMiniのヘリテージを深く解釈して作り上げたモデルでした。
BMWはこれが作りたかった


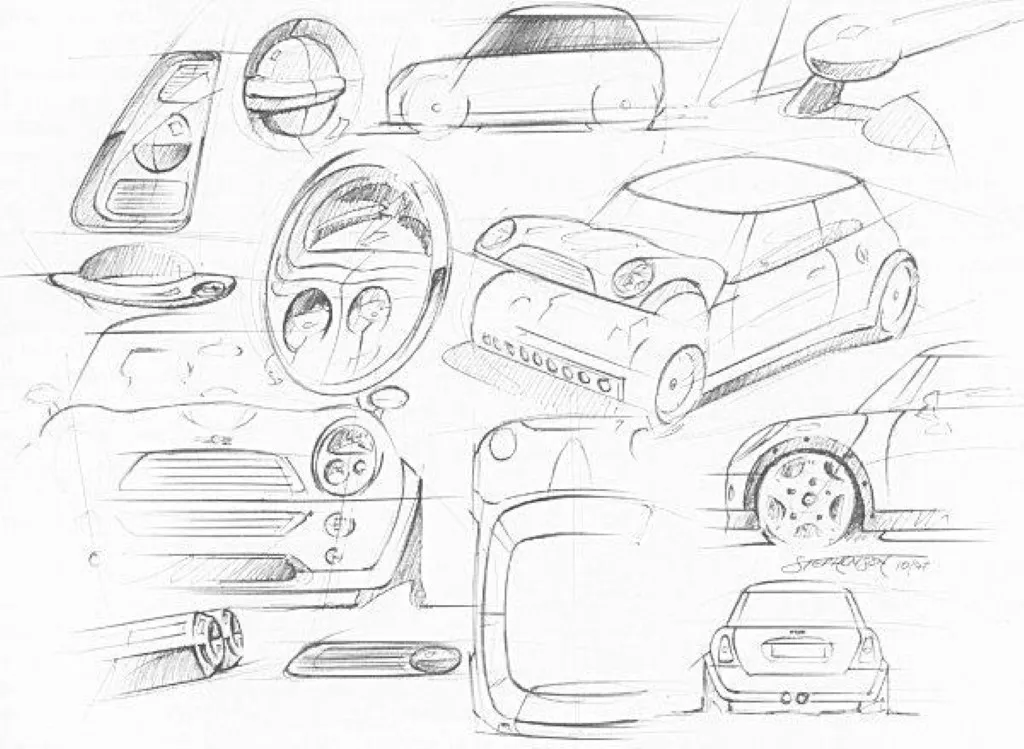
実際のところ、この2台のコンセプトモデルが登場するよりずっと前にBMW側の腹は決まっていたようで、2種類のコンセプトモデルが登場した直後、1997年9月のFrankfurt Motor Showで市販版R50とほぼ同じ仕立てのプロトタイプが公開されました。エンブレムやサイドグリル、テールライトやテールパイプの仕立てが市販版と異なるものの、ほぼ市販状態に近いスタイルをしており新しい時代が来たことを世に示しました。同じタイミングでライバルであるMercedesは市販版AーClassとMCC Smartを登場させましたが、注目度はこちらのほうが上でした。
後々知られることとして、ACV30とSpiritual/Spiritual Tooは社内コンペに登場したモデルをショーモデルに仕立てただけのものでした。特にSpiritual系統はモダンな外観にシティコミューターとしての機能を詰め込んだ意欲作ではあったものの『時代を10年先取りしすぎている』とボツになったとのこと。どことなくMCC Smart Coupeに似たコンセプトを有していたのので、その後Smartが失速する結果から見れば市販しなくて正解だったのかもしれません。話は逸れますが、BMWから2020年にMINI VISION URBANAUTを発表しましたが、どことなくSpiritualの現代解釈版のように見えるのは気のせいでしょうか?
この話をより深掘る内容として、CG別冊 MINI STYLE誌に初代BMW MINIの開発総指揮を務めたDr. Burghard Goeschel氏のインタビューコメントが掲載されています。それによると、やはりRover買収前にBMW社内で小型車開発をスタートさせていたこと、当初はゲイドンのRover拠点でデザインを主導していたが、やがてカルフォニアのDesignworks社を経てBMW Technik社がパッケージングを中心に参加したことを言及しています。
また、1997年には基本的なデザインは完成しており、これはテクニカルレイアウト、ボディシェル、ランニングギア、ドライブトレーン、果てにはドライビングポジションまで完成していたとのこと。その上で周囲の反応を見るためにFrankfurt Motor Showにプロトタイプを公開したとコメントしています。
ゲイドンとミュンヘンの合作が傑作を生み出した
時系列を少し戻します。次世代Miniのコンセプトやデザイン、数値目標などの商品企画はBMW側、車体開発はRoverが担うことになります。両社のプロジェクトがスタートした直後から、Rover側のエンジニアリングプロセスを変更、BMWのハードウェア・ソフトウェアシステムをゲイドンに移行し作業を進めたと言われています。一種のジョークかもしれませんが、移行作業はまずイギリスのヤード法からドイツのメートル法に切り替えることから始まったとも言われており、その苦労はかなりのものだったと推察されます。
その後の開発プロセスは両社の思想や仕事の進め方の違いに加え、Rover買収を決断したとされるBMW CEOのBernd Pischetsrieder退任など、様々な要因で主導権がコロコロ変わるという状態が続きます。一番大きな転機となったのが、2000年にBMWがRover Groupを売却したことです。このときBMWは即座にMiniブランドを手元に残すことを決定、初代X5の開発でノウハウを吸収し終わっていたLand Roverブランドとゲイドンの開発拠点はFordに売却。MiniとLand Roverを分離され残りカスとなったRover本体をたった10ポンドで売却していまいます。
その過程で、ゲイドンで進められていたR50開発はミュンヘンの総合開発チームが引き受けることになります。このとき、ゲイドン側にいた開発メンバーのほとんどはミュンヘンに移籍せず残留することとなったため、急遽引継のプロジェクトチームが結成されました。これが最終的に大きな転機となり、開発にかかわるすべての情報がBMW側へ引き継がれた上で、BMW基準での再開発が行われました。既に開発は佳境に差し掛かっていた中での転機でしたから、これまたかなり苦労したのではと思います。

前述のRover売却に伴い、生産工場の変更も行われました。もともとMiniはロングブリッジプラントで生産されており、R50も設備近代化したうえで生産を行う予定でした。ところがRover売却に伴う諸々の事情で、急遽オックスフォードプラントでの生産に変更されます。オックスフォードはRover 75製造に伴い既に近代化された状態だったためこちらを活かすという選択をしたのです。
通常、新型車開発は生産予定プラントのプロセス構築も並行して行うのが一般的ですから、急転直下で工場が変更になるのは極めて異例。これには相当頭を悩ませたそうです。結果的に、1997年にプロトタイプが発表→2001年に発売と4年弱の歳月がかかっています。

コメント